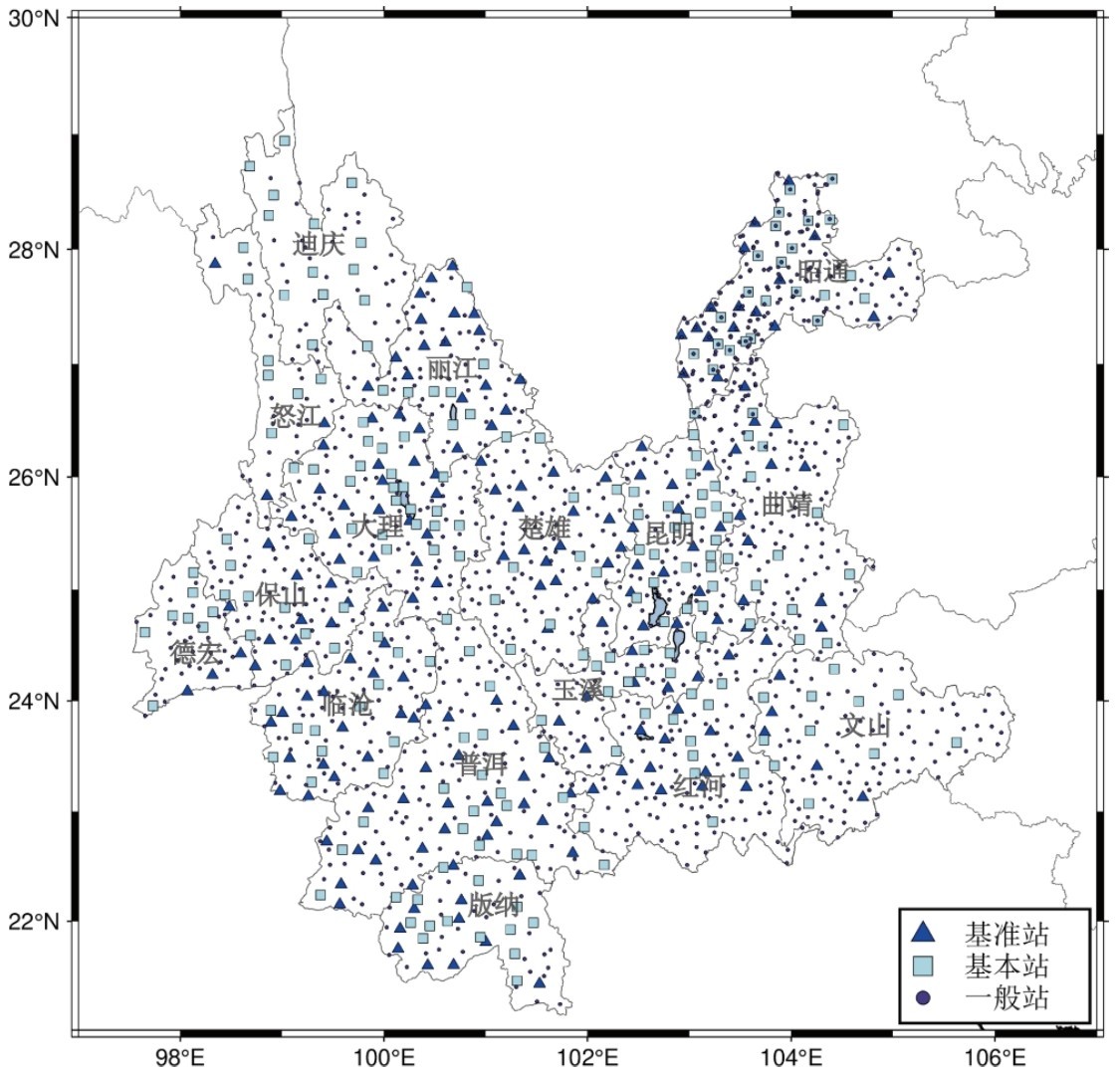
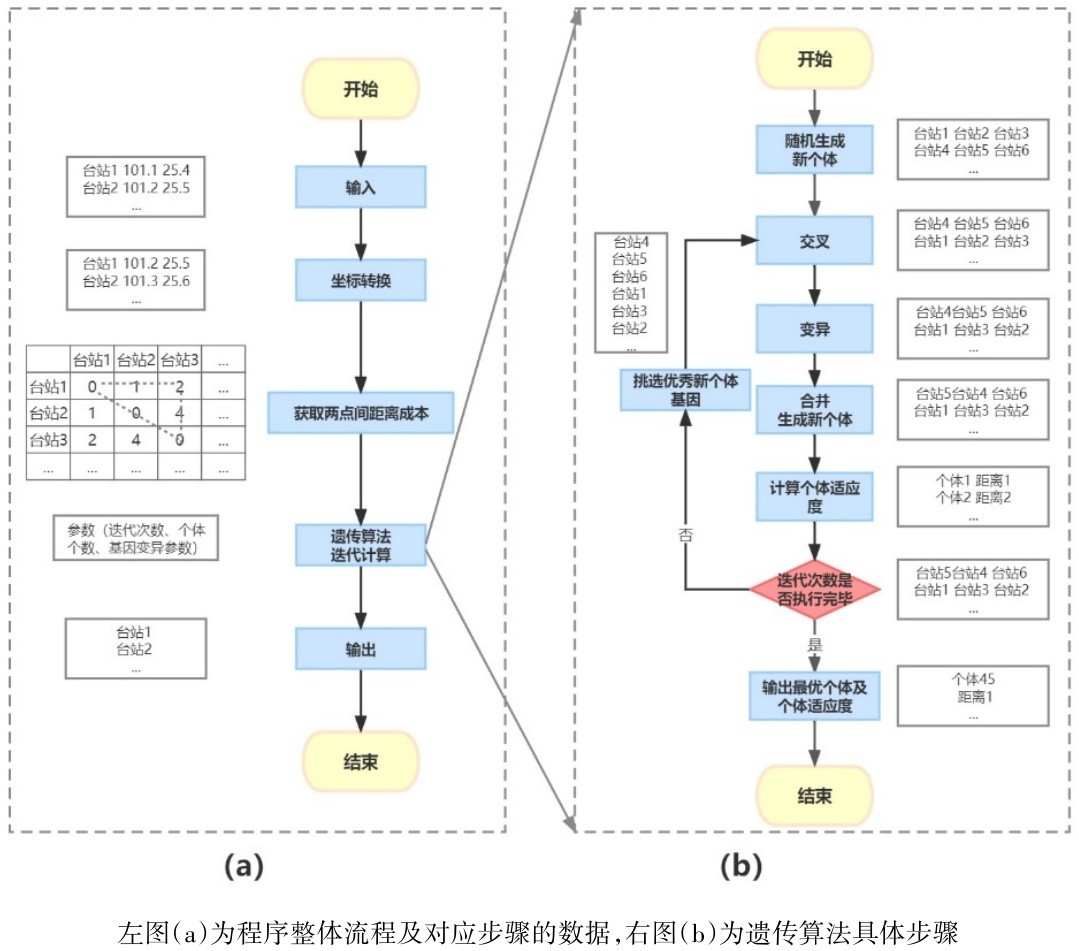
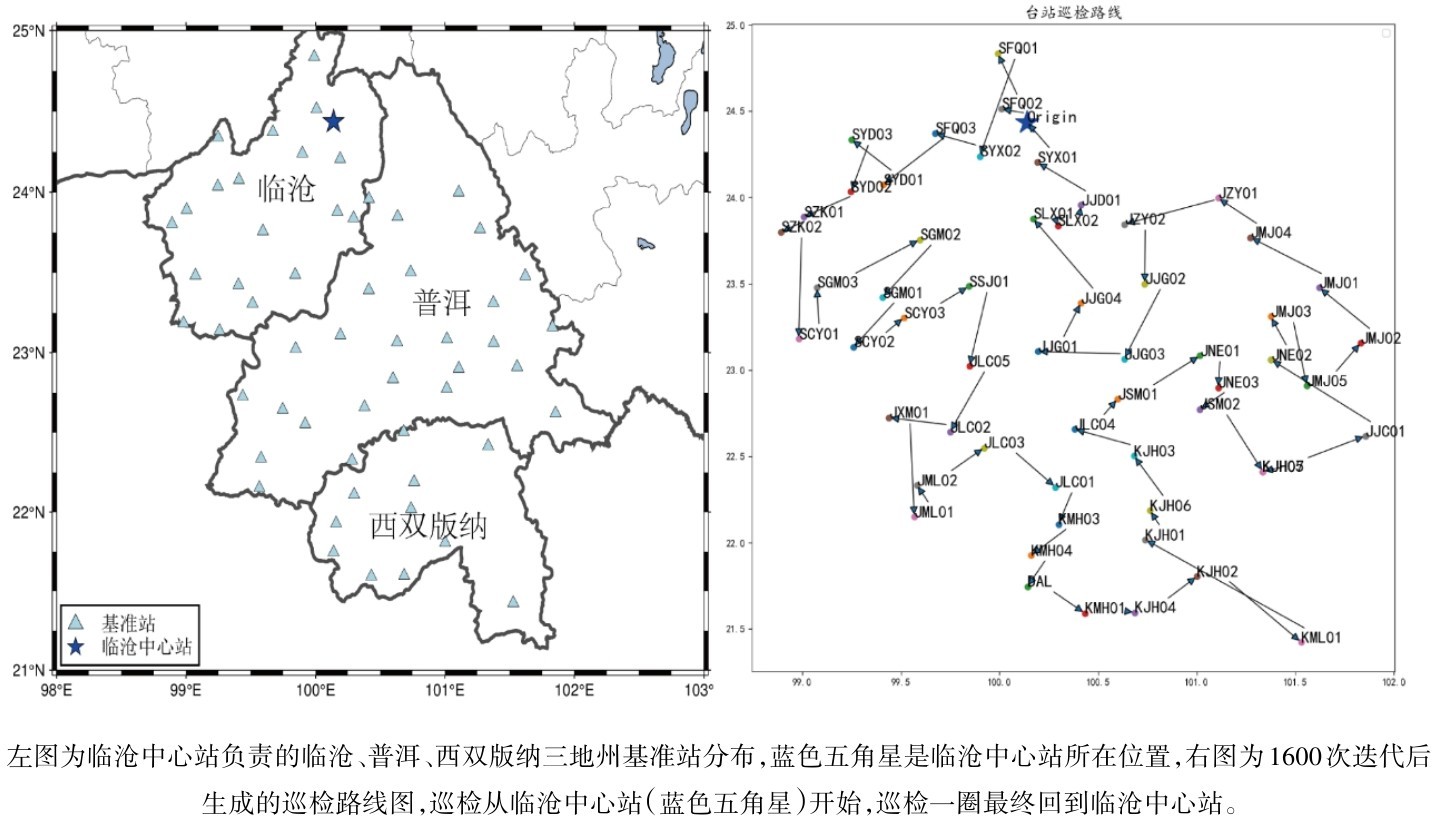
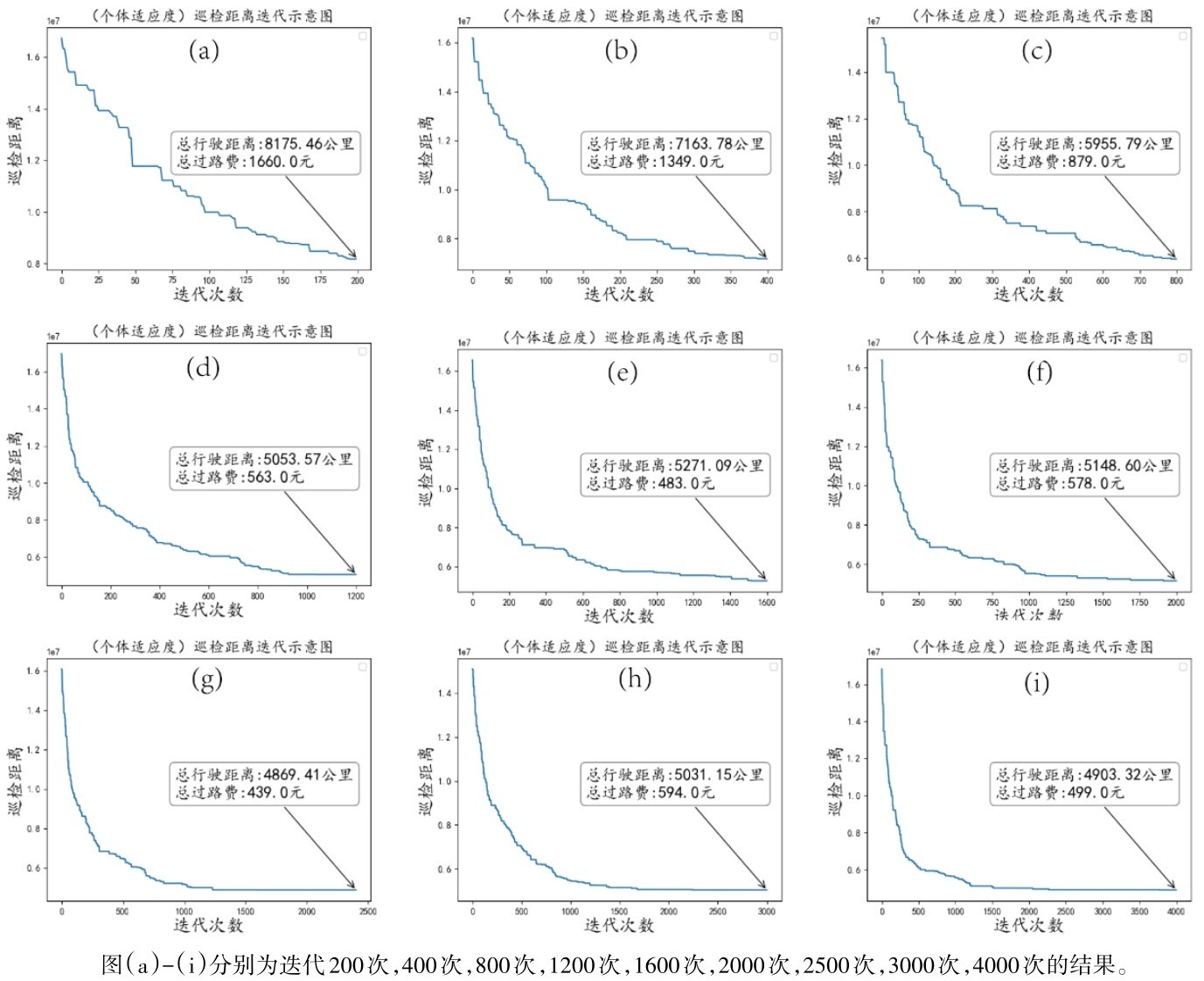
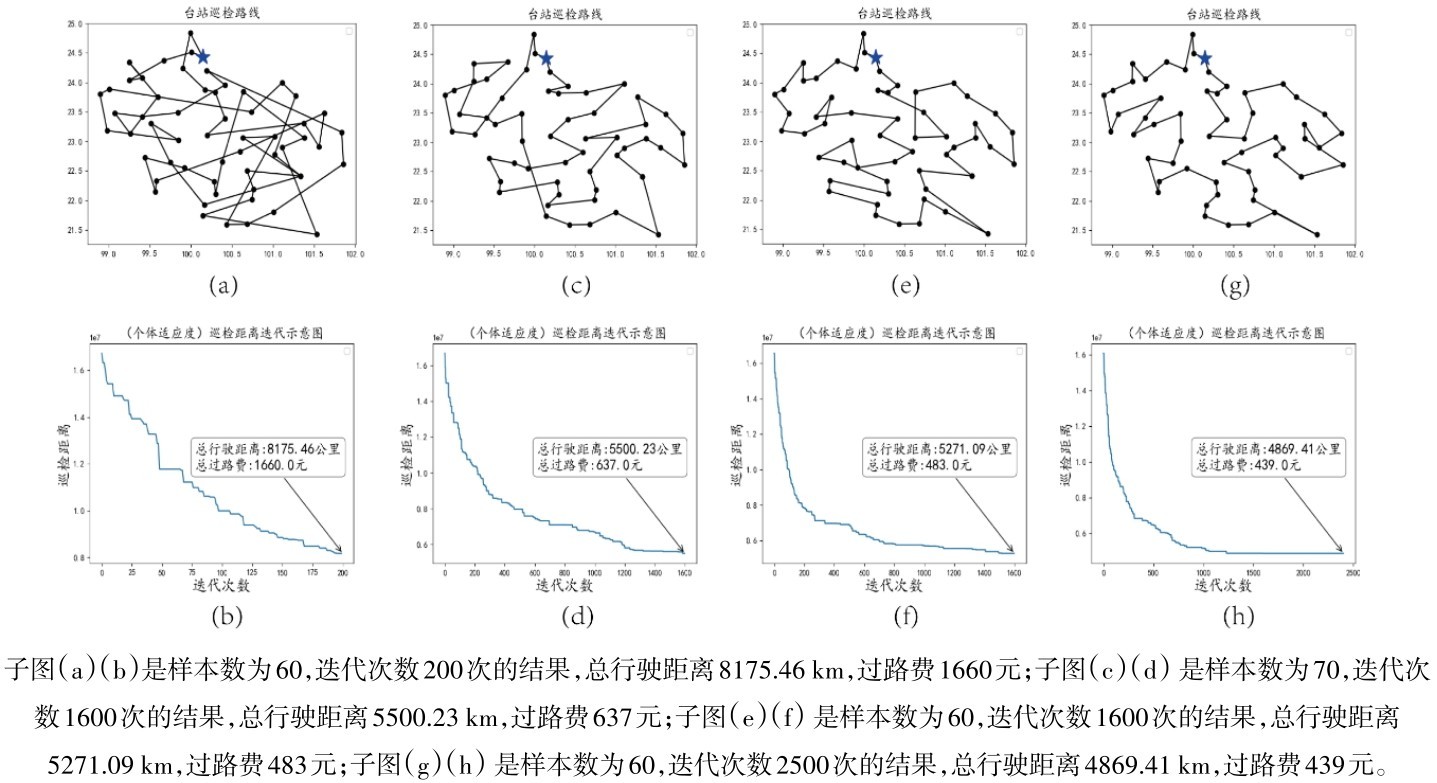
Due to the wide distribution of earthquake early warning stations and the small number of operation and maintenance personnel in seismic monitoring central stations, how to design a reasonable inspection path to accomplish more inspection tasks with less inspection cost becomes a problem for central stations. Based on the Amap API and genetic algorithm,this paper uses python to write a program to realize the automatic solution of the approximate optimal solution of the inspection path of the earthquake early warning station. After testing by inputting 57 EEW benchmark station locations in Yunnan,it is concluded that the system obtains the approximate optimal path with a total driving distance of 4869 km and a toll fee of 439 yuan RMB when the number of samples is 60 and the number of iterations is 2500. Compared with other convergence results, the optimal inspection path gains more than a hundred kilometers, so the inspection cost of the station inspection path planned by using genetic algorithm is lower.
图3 临沧、普洱、西双版纳地区基准站分布及最优巡检路线示意图Fig.3 The distribution of benchmark stations and schematic diagram of the optimal inspection path in Lincang,Pu′er and Xishuangbanna regions
图4 巡检距离迭代示意图。Fig.4 Schematic diagram of inspection distance iterations.
图5 不同参数下巡检路线和巡检距离迭代示意图。Fig.5 Schematic diagram of inspection route and inspection distance iterations under different parameters.