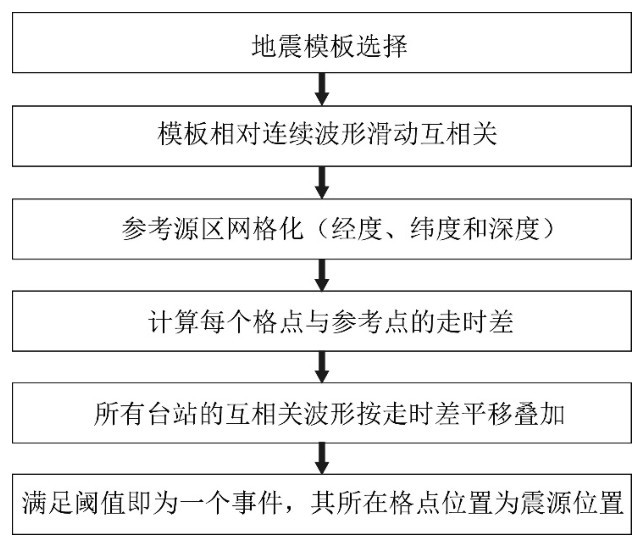
M&L方法的基本思想是利用波形互相关及双差走时方法实现微弱地震信号的检测和定位,对速度模型的依赖较小。M&L方法具体的计算流程如图4所示。
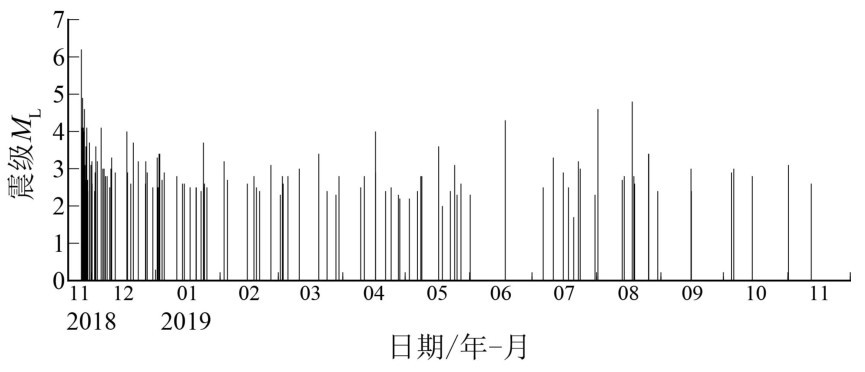
图1 台湾海峡MS6.2地震序列M-T图Fig.1 The M-T map of Taiwan Strait MS6.2 earthquake
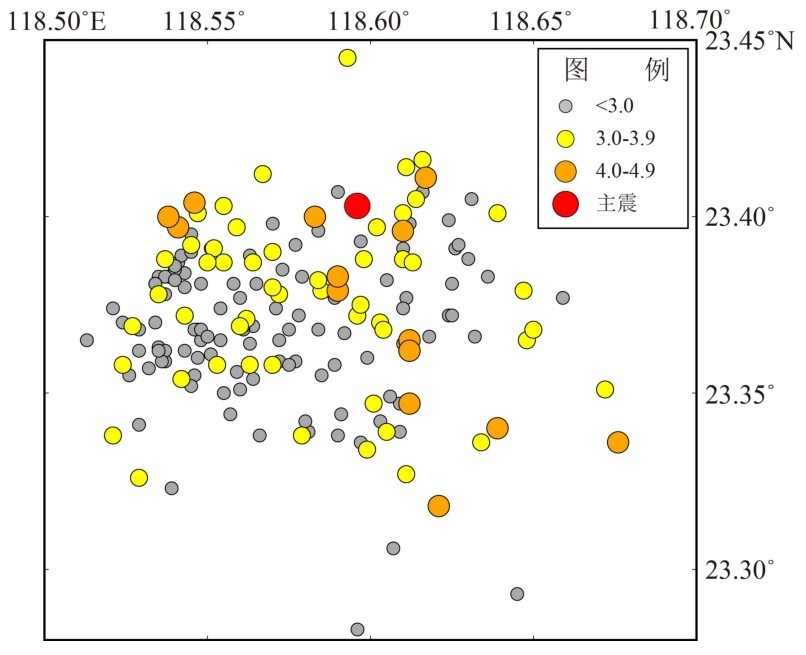
图2 台湾海峡MS6.2地震震中分布图Fig.2 Distribution of epicenters of the Taiwan Strait MS6.2 earthquake
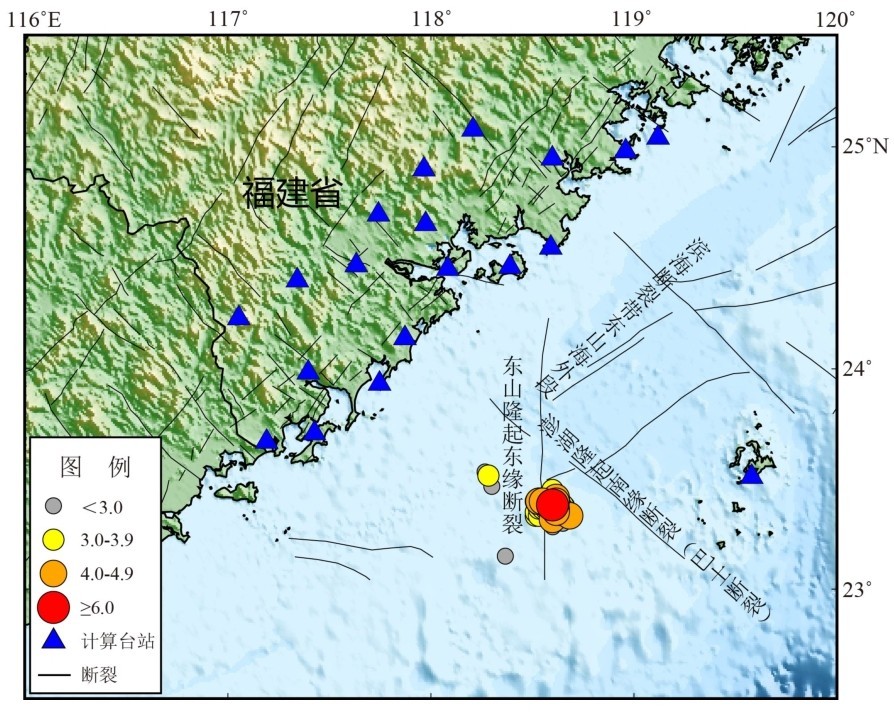
图3 台湾海峡MS6.2地震主震200 km范围内台站分布及附近断层Fig.3 Distribution of stations and faults within 200 km of the mainshock of the Taiwan strait MS6.2 earthquake
图4 M&L方法的流程示意图Fig.4 Flow diagram of the M&L method
(1)选取模板事件并确定位置。通常选取震相较清晰、高信噪比的事件作为模板事件,并从中选择能量最大的Sg震相与连续波形进行互相关计算,这样有利于提高检测的准确度。本文在模板事件的选取过程中,经过反复试验,先以1次ML3.0地震作为模板事件,检测定位福建台网目录里已有的以及遗漏的地震事件,然后再以重新检测定位后1次ML3.0以上的地震作为模板事件再进行检测,以此类推,直到现有目录里所有的地震均被检测出来。本文共选取了该地震序列中重新检测定位后的10次ML3.0以上地震作为模板事件。
(2)对原始数据波形进行重采样(20 Hz),去线性趋势及带通滤波(2~8 Hz)后,针对各个计算台站的每个分量,将模板事件的Sg震相和被检测的连续波形数据进行互相关计算。其中,Sg震相的参数信息是基于走时计算软件TauP计算得到,速度模型采用内置的PREM模型。本文截取Sg震相的前1 s和后3 s作为模板波形(滑动互相关的窗)。
(3)将模板事件所在的位置作为中心进行网格化,由于该地震发生在海里,台站分布较远且不均匀,缺乏近距离台站的有效约束,地震深度的计算误差较大,因此,我们将模板地震的发震深度设为固定深度(10 km),只在经、纬度两个方向上可能的地震位置进行搜索。本文选取搜索范围为0.05°×0.05°,搜索间隔为0.005°×0.005°。
(4)计算模板事件位置与微震位置(每个可能的格点)之间的Sg震相在同一个地震台站上的走时差。
(5)根据上一步骤计算出的走时差,对互相关波形进行走时校正和叠加,叠加后互相关波形的平均相关系数CC可表示为:
式(1)中:t0为模板窗的开始时刻、t1为模板窗的结束时刻;X(t)为模板波形的时间序列,Y(t)为连续波形的时间系列  模板波形时间序列的平均值
模板波形时间序列的平均值  为连续波形时间序列的平均值。为了降低微小地震误检的概率,除了设定平均相关系数的阈值外,还需要计算序列的绝对中位差(median absolute deviation, MAD)检测微小地震[14]。绝对中位差表达式为:
为连续波形时间序列的平均值。为了降低微小地震误检的概率,除了设定平均相关系数的阈值外,还需要计算序列的绝对中位差(median absolute deviation, MAD)检测微小地震[14]。绝对中位差表达式为:
式(2)中:Xi为第i个互相关系数序列; 为互相关系数平均值。
为互相关系数平均值。
在使用M&L方法进行微震事件的检测和定位过程中,阈值的设定通常通过多次的实验来确定,阈值设定太小,检测的结果就会包含太多误检事件,阈值设定的太大则可能会造成微震事件的丢失[15],一般情况下,会选择绝对中位差的9倍[16]或12倍[17]作为阈值。
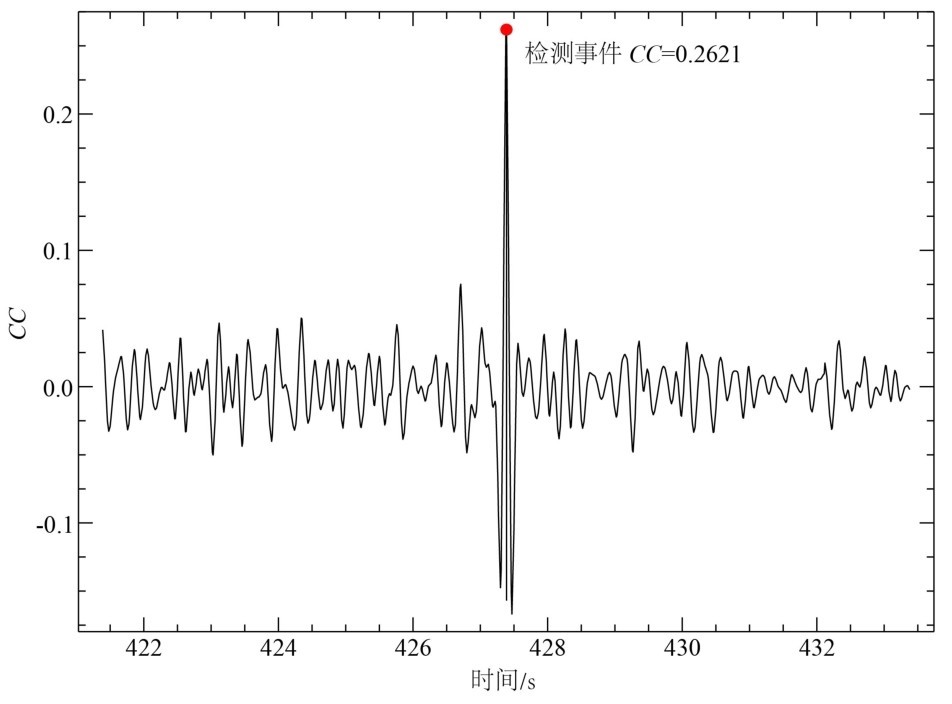
(6)当平均相关系数以及绝对中位差超过设定的阈值时,就可以认为检测到一个新的地震事件,拥有最大相关系数的格点位置就是检测到地震的震源位置。经过反复试验,本文设定平均相关系数阈值为0.15,绝对中位差阈值为12。阈值的设定本着尽量多的检测地震,尽量低的误检几率原则,主要考虑两个方面:①要保证福建台网人工目录里的事件都能被检测到;②对检测到的微小地震,要回看原始波形进行判断,以免包含太多的误检事件。图5显示了检测事件2018-11-26T00:07:07.36的检测示意图,叠加后的平均相关波形显示CC值为0.2621,大于设定的平均相关系数阈值0.15,这样就得到疑似地震事件,同时采用与信噪比联合约束最终来确认疑似地震。由于存在重复检测的情况,设定6s时间窗口内相关系数最大的地震为被检测到的事件。